 |  |  |
 | К&М |  |
 |  |  |
 |  |
|
| Четверг, 25.04.2024, 14:23 |
| Приветствую Вас Гость | RSS Главная | Регистрация | Вход |
Электроуправляемый привод модели дозирующего клапана
Раработки В ходе работ по продвижению изобретений электродинамический привод и комбинированный электроуправляемый привод, в соответствии с требованиями, предъявляемыми к приводам дозирующих клапанов аккумуляторных топливных систем и насос-форсунок дизелей, были разработаны, изготовлены и испытаны экспериментальные образцы электроуправляемых приводов ЭУП-А и ЭУП-Б соответственно. При этом на приводе ЭУП-А была получена частота повторения движений более 180 Гц, а на приводе ЭУП-Б более 500 Гц . Соответственно, показана возможность применения привода такого типа для управления дозирующим клапаном высокооборотного двигателя с непосредственным впрыскиванием топлива и искровым зажиганием. Привод по требованиям к аккумуляторным топливным системам дизелей
Привод по требованиям к насос-форсункам дизелей
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ДИНАМИКИ ДВИЖЕНИЯ ЭУП-А И ЭУП-Б.
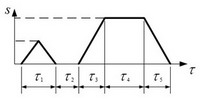
ТРЕБОВАНИЯ К ДИНАМИКЕ ДВИЖЕНИЯ ДОЗИРУЮЩИХ КЛАПАНОВ ТОПЛИВНЫХ СИСТЕМ ДИЗЕЛЕЙ По требованиям к топливной аппаратуре дизелей для двухфазного впрыскивания топлива должна обеспечиваться временная диаграмма движения дозирующего клапана при частоте повторений не менее 17 Гц, такого вида:
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ ДИНАМИКИ ДВИЖЕНИЯ ЭУП-А. 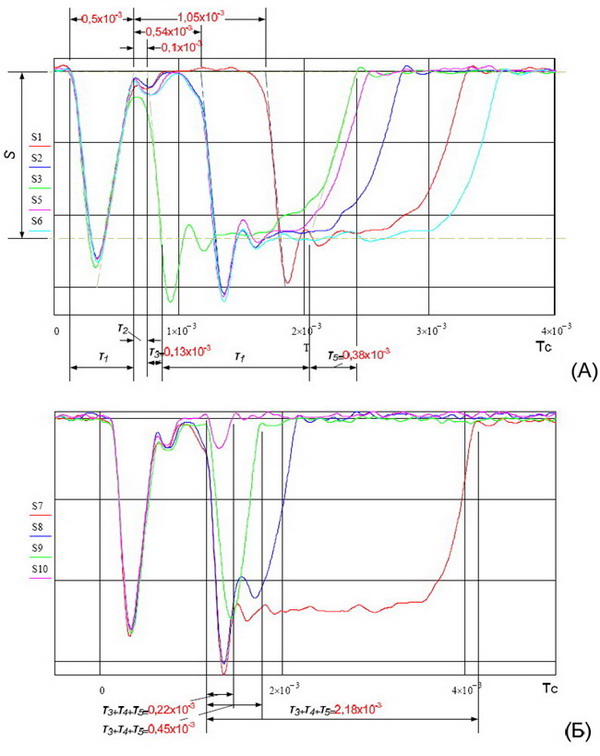 Рисунок 4. Осциллограммы движения МДК-А в режиме с «предварительным впрыскиванием». 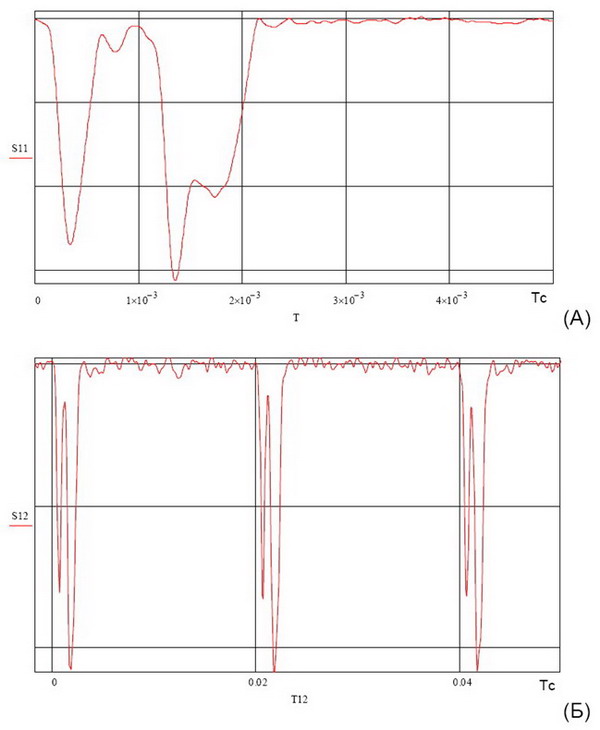 Рисунок 5. Осциллограммы движения МДК-А в режиме с «предварительным впрыскиванием» при частоте повторения движений 17 Гц (А) и 50 Гц (Б). 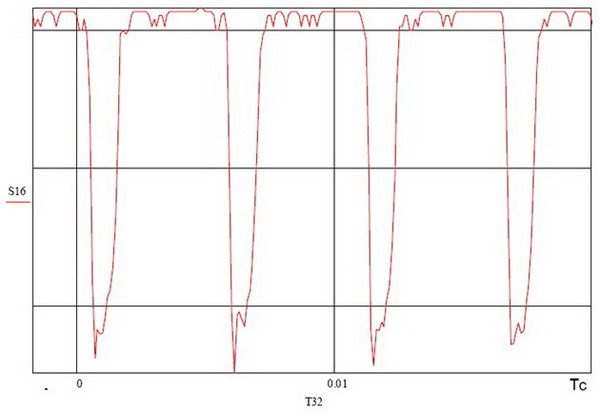 Рисунок 6. Осциллограмма движения МДК-А в режиме без «предварительного впрыскивания» при частоте повторения движений 187 Гц. Как видно по приведенным осциллограммам (рисунок 4 (А и Б)), сервопривод обеспечивает время «предварительного впрыскивания» τ1=0,5 мс, управление временем τ2 от 0 до 1 мс, время полного подъёма (S) МДК-А τ3 =0,13мс, время опускания МДК-А τ5 =0,38мс, общее время поднятого состояния МДК-А (сумму τ3, τ4, τ5) задается от 0,22 мс до 0,45 мс при частичном подъёме МДК-А и от 0,45 мс до 2,18 мс при полном подъёме МДК-А. На рисунке 5 приведены осциллограммы движения МДК-А в режиме с «предварительным впрыскиванием» при частоте повторения движений 17 Гц (рисунок_4 (А) и 50 Гц (рисунок 4 (Б). На рисунке 6 приведена осциллограмма движения МДК-А в режиме без «предварительного впрыскивания» при частоте повторения движений 187 Гц. ТАКИМ ОБРАЗОМ, ЭУП-А ОБЕСПЕЧИВАЕТ ТРЕБУЕМЫЕ ВРЕМЯ «ПРЕДВАРИТЕЛЬНОГО ВПРЫСКИВАНИЯ» τ1=0,5 МС И УПРАВЛЕНИЕ ВРЕМЕНЕМ τ2 ОТ 0 ДО 1 МС. ВРЕМЯ ПОЛНОГО ПОДЪЁМА (S) ОБЕСПЕЧИВАЕТСЯ НА 300% ЛУЧШЕ, ЧЕМ ДОПУСКАЕТСЯ, ВРЕМЯ ОПУСКАНИЯ τ5 ОБЕСПЕЧИВАЕТСЯ НА 30% ЛУЧШЕ, ЧЕМ ДОПУСКАЕТСЯ. РЕГУЛИРОВКА ОБЩЕГО ВРЕМЕНИ ПОДНЯТОГО СОСТОЯНИЯ (сумма времен τ3, τ4 и τ5) ОБЕСПЕЧИВАЕТСЯ В БОЛЕЕ ШИРОКИХ ПРЕДЕЛАХ, ЧЕМ ТРЕБУЕТСЯ. ПРОДЕМОНСТРИРОВАНЫ ВОЗМОЖНОСТИ ЭУП-А ПОВТОРЯТЬ ДВИЖЕНИЯ С ЧАСТОТОЙ В 11 РАЗ ПРЕВОСХОДЯЩЕЙ ТРЕБОВАНИЯ. РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ ДИНАМИКИ ДВИЖЕНИЯ ЭУП-Б. Результаты экспериментальных исследований подтвердили соответствие характеристик ЭУП-Б требованиям электроуправляемых насос-форсунок дизелей. кроме того, была продемонстрирована возможность работа такого привода с частотой повторения движений вплоть до 1 кГц при кратковременных режимах работы. для обеспечения продолжительных режимов работы требуется разработка более мощного блока управления. 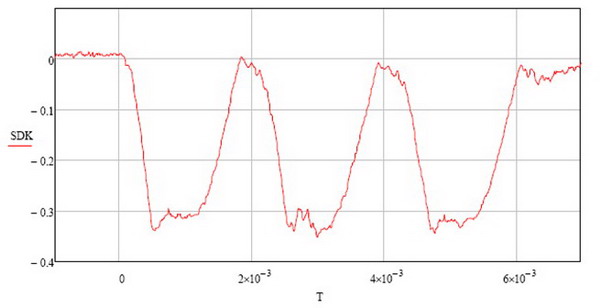 Рисунок 7. Осциллограмма движения МДК-Б в режиме без «предварительного впрыскивания» при частоте повторения движений 500 Гц. ОПИСАНИЕ КОНСТРУКЦИИ ЭП-А.
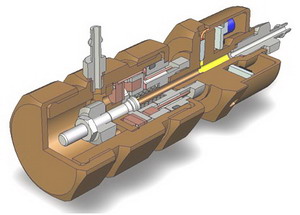
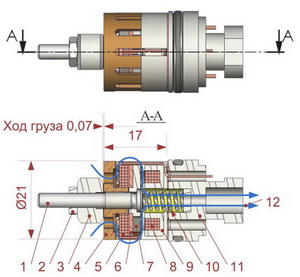
ЭП-А
состоит из катушки электродинамической поз.5 вклеенной в корпус поз.4,
якоря привода спаянного из диска поз.6 и магнитопровода поз.7, катушки
электромагнита поз.8 вклеенной в корпус электромагнита поз.9. При
подаче импульсов тока на обмотки катушек ЭП-А приводит в движение
толкатель поз.1. На резьбовой хвостовик толкателя накручивается груз
поз.3, который стопорится контргайкой поз.2. Зазор между грузом и
корпусом катушки электродинамической обеспечивает заданное перемещение
толкателя. Толкатель перемещается в направляющей, выполненной в корпусе
катушки электродинамической. Пружина возвратная поз.12 обеспечивает
возврат толкателя в исходное положение после прекращения импульсов
тока. Выделяющаяся при работе привода теплота отводится в стенки
корпуса модели клапана и в проходящее через полость привода топливо
поз.12. Подробно работа привода описана в патентах
«Электродинамический привод», и «Комбинированный электроуправляемый привод». ОПИСАНИЕ КОНСТРУКЦИИ ЭП-Б
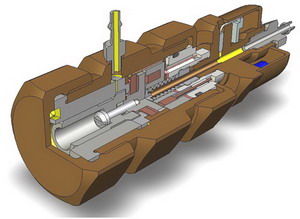
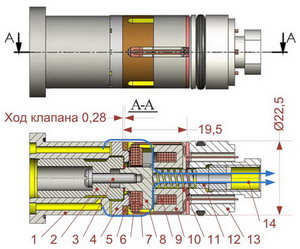
ЭП-Б
состоит из катушки электродинамической (поз.6) вклеенной в корпус
(поз.5), якоря привода спаянного из диска (поз.7) и магнитопровода
(поз.8), катушки электромагнита (поз.9) вклеенной в корпус
электромагнита (поз.10). При подаче импульсов тока на обмотки катушек,
ЭП-Б приводит в движение клапан (поз.2), прикреплённый к якорю с
помощью винта (поз.3). Зазор между клапаном и упором клапана (поз.4)
обеспечивает заданное перемещение клапана. Клапан перемещается в
направляющей, выполненной в корпусе клапана (поз.1). Пружина возвратная
(поз.11) обеспечивает возврат якоря в исходное положение после
прекращения импульсов тока. Выделяющаяся при работе привода теплота
отводится в стенки катушки и электромагнита, а, также, и в проходящее
через полость привода топливо (поз.14). Подробно работа привода описана в патентах
«Электродинамический привод», и «Комбинированный электроуправляемый привод». Детали
сервоприводов ЭП-А и ЭП-Б выполнены из обычных конструкционных и
электротехнических материалов. Так, корпуса (поз.4 рисунка 8 и поз.5 рисунка 9)
катушки электродинамической изготовлен из латуни Л80 ГОСТ 15527-70,
катушка электродинамическая и катушка электромагнита
наматываются из провода ПЭТ 200 с последующей пропиткой эпоксидным
компаундом ЭД 20, диск (поз.6 рисунка 8 и поз.7 рисунка 9) изготовлен из электротехнической меди
магнитопровод якоря и корпус электромагнита изготовлены из
стали электротехнической (марки 11880). Величина и допуски
точности размеров деталей соответствуют обычным величинам и допускам
деталей тяговых электромагнитов широко используемых например в
конструкциях реле. Таким образом, КОНСТРУКЦИЯ ПРИВОДА И
ПРИМЕНЯЕМЫЕ МАТЕРИАЛЫ ОБЕСПЕЧИВАЮТ ВОЗМОЖНОСТЬ ЕГО СЕРИЙНОГО
ПРОИЗВОДСТВА НА ЛЮБОМ ПРЕДПРИЯТИИ ЭЛЕКТРОТЕХНИЧЕСКОГО ПРОФИЛЯ, ПО
СВОЙСТВАМ ПРИМЕНЯЕМЫХ МАТЕРИАЛОВ И УСЛОВИЯМ ИЗОЛЯЦИИ ОНИ СПОСОБНЫ ПРОТИВОСТОЯТЬ АГРЕССИВНОМУ ВОЗДЕЙСТВИЮ ДИЗЕЛЬНОГО
ТОПЛИВА И ЕГО ПАРОВ, МОГУТ СОХРАНЯТЬ
РАБОТОСПОСОБНОСТЬ ВО ВСЕМ ДИАПАЗОНЕ РАБОЧИХ ТЕМПЕРАТУР СЕРИЙНОЙ
ЭЛЕКТРОУПРАВЛЯЕМОЙ ТА. | ||||||||||||||||
 |  |
| Кирилюк © 2024 |
