









Раработки
В ходе работ по продвижению изобретений электродинамический привод и комбинированный электроуправляемый привод, в соответствии с требованиями, предъявляемыми к приводам дозирующих клапанов аккумуляторных топливных систем и насос-форсунок дизелей, были разработаны, изготовлены и испытаны экспериментальные образцы электроуправляемых приводов ЭУП-А и ЭУП-Б соответственно.
В ходе работ по продвижению изобретений электродинамический привод и комбинированный электроуправляемый привод, в соответствии с требованиями, предъявляемыми к приводам дозирующих клапанов аккумуляторных топливных систем и насос-форсунок дизелей, были разработаны, изготовлены и испытаны экспериментальные образцы электроуправляемых приводов ЭУП-А и ЭУП-Б соответственно.
При этом на приводе ЭУП-А была получена частота повторения движений более 180 Гц, а на приводе ЭУП-Б более 500 Гц . Соответственно, показана возможность применения привода такого типа для управления дозирующим клапаном высокооборотного двигателя с непосредственным впрыскиванием топлива и искровым зажиганием.
Привод по требованиям к аккумуляторным топливным системам дизелей
ЭУП-А состоит из блока формирования силового электрического импульса управления (БУ) (рисунок 3) и сервопривода (ЭП-А) (Рисунок_8). ЭП-А с целью проведения экспериментов установлен на модели дозирующего клапана (МДК-А) с датчиком перемещения подвижной части модели (Рисунок_1).
Перемещаемая масса модели дозирующего клапана, усилие предварительной затяжки пружины, ход s соответствуют требованиям к приводам дозирующих клапанов аккумуляторных топливных систем. | 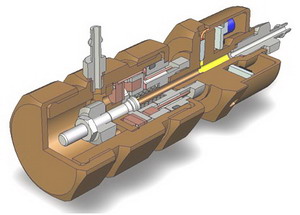 Рисунок 1. сервопривод ЭП-А на модели дозирующего клапана МДК-А с установленным датчиком перемещения. |
Привод по требованиям к насос-форсункам дизелей
| ЭУП-Б состоит из блока формирования силового
электрического импульса управления (БУ) (Рисунок 3) и сервопривода (ЭП-Б) (Рисунок_9). ЭП-Б с целью проведения экспериментов установлен на модели дозирующего клапана (МДК-Б) с датчиком подвижной части модели (Рисунок_2).
Перемещаемая масса модели дозирующего клапана, усилие предварительной затяжки пружины, ход s соответствуют требованиям к приводам дозирующих клапанов насос-форсунок дизелей. | 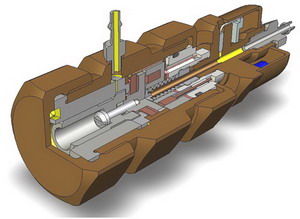 Рисунок 2. сервопривод ЭП-Б на модели дозирующего клапана МДК-Б с установленным датчиком перемещения. |
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ДИНАМИКИ ДВИЖЕНИЯ ЭУП-А И ЭУП-Б.
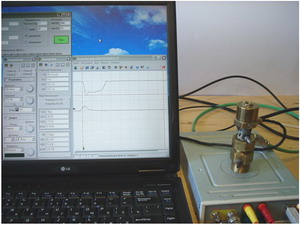 Рисунок 3. Экспериментальная установка для исследований ЭУП-А. | Экспериментальная установка состоит из блока управления комбинированным приводом БУ и сервопривода ЭП-А установленного в полость модели дозирующего клапана МДК-А или сервопривода ЭП-Б установленного в полость модели дозирующего клапана МДК-Б. При работе в частотном режиме, для обеспечения охлаждения, используется стенд топливного клапана СТК1 . Измерения выполняются с помощью цифрового осциллографа АСК-3117. Для задания параметров работы БУ и записи осциллограмм используется компьютер. На этой установке были проведены следующие исследования:
|
ТРЕБОВАНИЯ К ДИНАМИКЕ ДВИЖЕНИЯ ДОЗИРУЮЩИХ КЛАПАНОВ ТОПЛИВНЫХ СИСТЕМ ДИЗЕЛЕЙ
По требованиям к топливной аппаратуре дизелей для двухфазного впрыскивания топлива должна обеспечиваться временная диаграмма движения дозирующего клапана при частоте повторений не менее 17 Гц, такого вида:
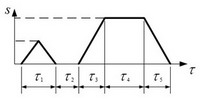 | Где:
|
- Время «предварительного впрыска» τ1 должно составлять 0,3…0,5 мс.
- Интервал времени τ2 должен задаваться в диапазоне 0…1 мс.
- Время полного хода S дозирующего клапана τ3 не более 0,5 мс.
- Время опускания дозирующего клапана τ5 не более 0,6 мс.
- Общее время открытого состояния клапана (сумма времен τ3, τ4 и τ5), должно задаваться - при полном ходе S клапана в диапазоне 1,35…2,4 мс, и при частичном подъёме клапана 0,3…1,35 мс.
- Точность промежутков τ1, τ2, τ3, τ4, τ5 должна лежать в пределах ± 0,01мс.
- Стабильность промежутков τ1, τ2, τ3, τ4, τ5 должна лежать в пределах ± 0,6 %.
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ ДИНАМИКИ ДВИЖЕНИЯ ЭУП-А.
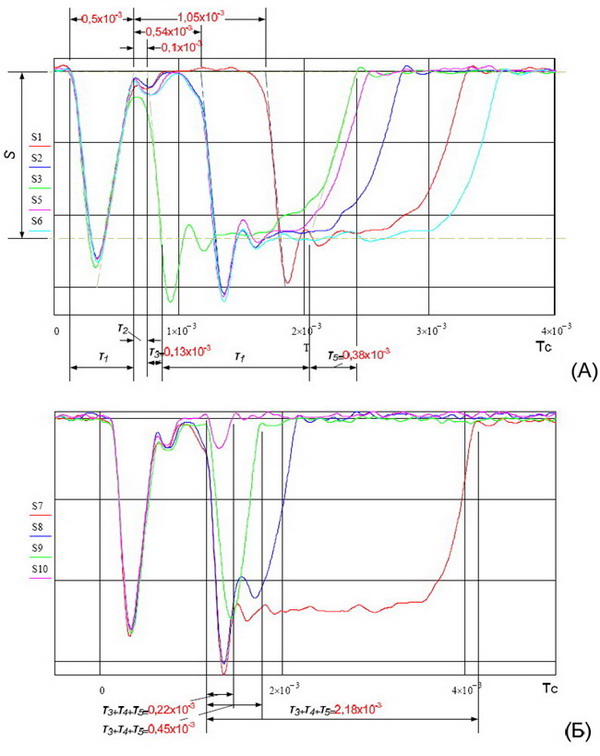
Рисунок 4. Осциллограммы движения МДК-А
в режиме с «предварительным впрыскиванием».
в режиме с «предварительным впрыскиванием».
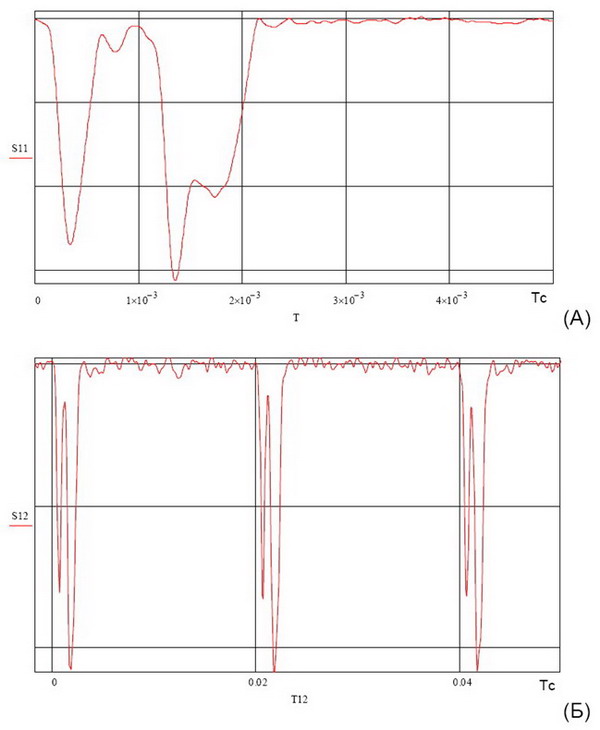
Рисунок 5. Осциллограммы движения МДК-А
в режиме с «предварительным впрыскиванием»
при частоте повторения движений 17 Гц (А) и 50 Гц (Б).
в режиме с «предварительным впрыскиванием»
при частоте повторения движений 17 Гц (А) и 50 Гц (Б).
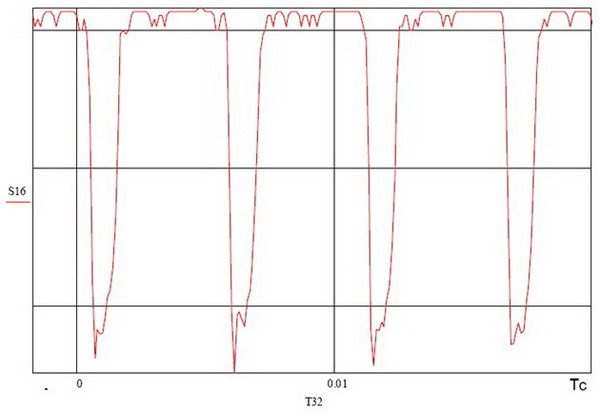
Рисунок 6. Осциллограмма движения МДК-А
в режиме без «предварительного впрыскивания»
при частоте повторения движений 187 Гц.
в режиме без «предварительного впрыскивания»
при частоте повторения движений 187 Гц.
Как видно по приведенным осциллограммам (рисунок 4 (А и Б)), сервопривод обеспечивает время «предварительного впрыскивания» τ1=0,5 мс, управление временем τ2 от 0 до 1 мс, время полного подъёма (S) МДК-А τ3 =0,13мс, время опускания МДК-А τ5 =0,38мс, общее время поднятого состояния МДК-А (сумму τ3, τ4, τ5) задается от 0,22 мс до 0,45 мс при частичном подъёме МДК-А и от 0,45 мс до 2,18 мс при полном подъёме МДК-А.
На рисунке 5 приведены осциллограммы движения МДК-А в режиме с «предварительным впрыскиванием» при частоте повторения движений 17 Гц (рисунок_4 (А) и 50 Гц (рисунок 4 (Б).
На рисунке 6 приведена осциллограмма движения МДК-А в режиме без «предварительного впрыскивания» при частоте повторения движений 187 Гц.
ТАКИМ ОБРАЗОМ, ЭУП-А ОБЕСПЕЧИВАЕТ ТРЕБУЕМЫЕ ВРЕМЯ «ПРЕДВАРИТЕЛЬНОГО ВПРЫСКИВАНИЯ» τ1=0,5 МС И УПРАВЛЕНИЕ ВРЕМЕНЕМ τ2 ОТ 0 ДО 1 МС. ВРЕМЯ ПОЛНОГО ПОДЪЁМА (S) ОБЕСПЕЧИВАЕТСЯ НА 300% ЛУЧШЕ, ЧЕМ ДОПУСКАЕТСЯ, ВРЕМЯ ОПУСКАНИЯ τ5 ОБЕСПЕЧИВАЕТСЯ НА 30% ЛУЧШЕ, ЧЕМ ДОПУСКАЕТСЯ. РЕГУЛИРОВКА ОБЩЕГО ВРЕМЕНИ ПОДНЯТОГО СОСТОЯНИЯ (сумма времен τ3, τ4 и τ5) ОБЕСПЕЧИВАЕТСЯ В БОЛЕЕ ШИРОКИХ ПРЕДЕЛАХ, ЧЕМ ТРЕБУЕТСЯ. ПРОДЕМОНСТРИРОВАНЫ ВОЗМОЖНОСТИ ЭУП-А ПОВТОРЯТЬ ДВИЖЕНИЯ С ЧАСТОТОЙ В 11 РАЗ ПРЕВОСХОДЯЩЕЙ ТРЕБОВАНИЯ.
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ ДИНАМИКИ ДВИЖЕНИЯ ЭУП-Б.
Результаты экспериментальных исследований подтвердили соответствие характеристик ЭУП-Б требованиям электроуправляемых насос-форсунок дизелей. кроме того, была продемонстрирована возможность работа такого привода с частотой повторения движений вплоть до 1 кГц при кратковременных режимах работы. для обеспечения продолжительных режимов работы требуется разработка более мощного блока управления.
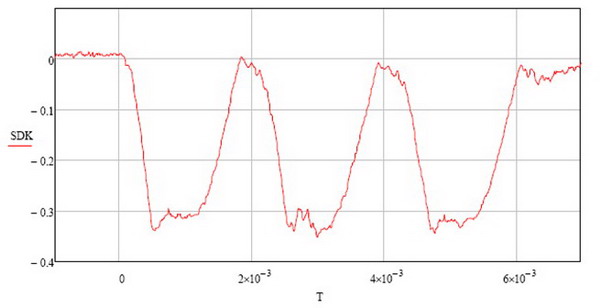
Рисунок 7. Осциллограмма движения МДК-Б
в режиме без «предварительного впрыскивания»
при частоте повторения движений 500 Гц.
ОПИСАНИЕ КОНСТРУКЦИИ ЭП-А.
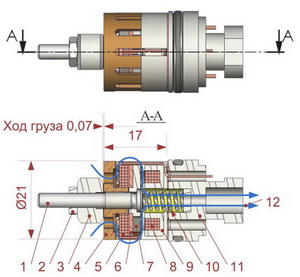 | Позиции: 1. Толкатель 2. Контргайка 3. Груз 4. Корпус катушки электродинамической 5. Катушка электродинамическая 6. Диск 7. Магнитопровод 8. Катушка электромагнита 9. Корпус электромагнита 10. Пружина возвратная 11. Крышка привода 12. Топливо для охлаждения привода |
Рисунок 8. Модель дозирующего клапана (МДК-А) с электроуправляемым приводом ЭП-А. | |
ЭП-А
состоит из катушки электродинамической поз.5 вклеенной в корпус поз.4,
якоря привода спаянного из диска поз.6 и магнитопровода поз.7, катушки
электромагнита поз.8 вклеенной в корпус электромагнита поз.9. При
подаче импульсов тока на обмотки катушек ЭП-А приводит в движение
толкатель поз.1. На резьбовой хвостовик толкателя накручивается груз
поз.3, который стопорится контргайкой поз.2. Зазор между грузом и
корпусом катушки электродинамической обеспечивает заданное перемещение
толкателя. Толкатель перемещается в направляющей, выполненной в корпусе
катушки электродинамической. Пружина возвратная поз.12 обеспечивает
возврат толкателя в исходное положение после прекращения импульсов
тока. Выделяющаяся при работе привода теплота отводится в стенки
корпуса модели клапана и в проходящее через полость привода топливо
поз.12. Подробно работа привода описана в патентах
«Электродинамический привод», и «Комбинированный электроуправляемый привод».
ОПИСАНИЕ КОНСТРУКЦИИ ЭП-Б
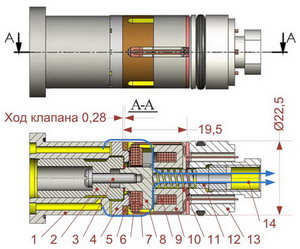 | Позиции:
|
| Рисунок 9. Электроуправляемый привод ЭП-Б в сборе с клапаном дозирующим. | |
ЭП-Б
состоит из катушки электродинамической (поз.6) вклеенной в корпус
(поз.5), якоря привода спаянного из диска (поз.7) и магнитопровода
(поз.8), катушки электромагнита (поз.9) вклеенной в корпус
электромагнита (поз.10). При подаче импульсов тока на обмотки катушек,
ЭП-Б приводит в движение клапан (поз.2), прикреплённый к якорю с
помощью винта (поз.3). Зазор между клапаном и упором клапана (поз.4)
обеспечивает заданное перемещение клапана. Клапан перемещается в
направляющей, выполненной в корпусе клапана (поз.1). Пружина возвратная
(поз.11) обеспечивает возврат якоря в исходное положение после
прекращения импульсов тока. Выделяющаяся при работе привода теплота
отводится в стенки катушки и электромагнита, а, также, и в проходящее
через полость привода топливо (поз.14). Подробно работа привода описана в патентах
«Электродинамический привод», и «Комбинированный электроуправляемый привод».
Детали
сервоприводов ЭП-А и ЭП-Б выполнены из обычных конструкционных и
электротехнических материалов. Так, корпуса (поз.4 рисунка 8 и поз.5 рисунка 9)
катушки электродинамической изготовлен из латуни Л80 ГОСТ 15527-70,
катушка электродинамическая и катушка электромагнита
наматываются из провода ПЭТ 200 с последующей пропиткой эпоксидным
компаундом ЭД 20, диск (поз.6 рисунка 8 и поз.7 рисунка 9) изготовлен из электротехнической меди
магнитопровод якоря и корпус электромагнита изготовлены из
стали электротехнической (марки 11880). Величина и допуски
точности размеров деталей соответствуют обычным величинам и допускам
деталей тяговых электромагнитов широко используемых например в
конструкциях реле.
Таким образом, КОНСТРУКЦИЯ ПРИВОДА И
ПРИМЕНЯЕМЫЕ МАТЕРИАЛЫ ОБЕСПЕЧИВАЮТ ВОЗМОЖНОСТЬ ЕГО СЕРИЙНОГО
ПРОИЗВОДСТВА НА ЛЮБОМ ПРЕДПРИЯТИИ ЭЛЕКТРОТЕХНИЧЕСКОГО ПРОФИЛЯ, ПО
СВОЙСТВАМ ПРИМЕНЯЕМЫХ МАТЕРИАЛОВ И УСЛОВИЯМ ИЗОЛЯЦИИ ОНИ СПОСОБНЫ ПРОТИВОСТОЯТЬ АГРЕССИВНОМУ ВОЗДЕЙСТВИЮ ДИЗЕЛЬНОГО
ТОПЛИВА И ЕГО ПАРОВ, МОГУТ СОХРАНЯТЬ
РАБОТОСПОСОБНОСТЬ ВО ВСЕМ ДИАПАЗОНЕ РАБОЧИХ ТЕМПЕРАТУР СЕРИЙНОЙ
ЭЛЕКТРОУПРАВЛЯЕМОЙ ТА.


