И. О. Кирилюк Существует ряд устройств, для функционирования
которых требуются силовые электроуправляемые приводы, обеспечивающие
заданные перемещения в течении очень коротких (менее миллисекунды) и
точно управляемых промежутков времени, как при одиночных, так и при
многократных срабатываниях.
Например, в схемах управления переменным током высокой мощности можно
разорвать или установить контакт в течении одного из коротких
промежутков времени, когда мгновенная мощность в схеме относительно
низка. В устройствах отбора проб жидкостей или газов, в случае изучения
быстроизменяющихся процессов, требуется произвести отбор образца в
точно определенный промежуток времени. В системах дозирования жидкостей
или газов скорость и точность работы привода является определяющей для
достижения точности дозирования. Кроме того, выполнение современных
нормативных требований по выбросам вредных веществ с отработавшими
газами и повышение экономических показателей современных двигателей
внутреннего сгорания невозможно без применения системы питания с
электронным управлением топливоподачей, а значит и с быстродействующим
электроуправляемым приводом элементов топливной аппаратуры.
В настоящее время для указанных устройств используются силовые приводы,
действие которых основано на использовании различных физических
эффектов. Это пьезоэлектрические, магнитострикционные, электромагнитные и электродинамические силовые приводы. Однако эти приводы зачастую не могут обеспечить требуемого быстродействия и точности работы.
Применив
в одном устройстве физические эффекты, используемые в электромагнитных
и электродинамических силовых приводах (усовершенствовав при этом электродинамический силовой привод), нам удалось преодолеть их известные недостатки и получить привод с качественно новыми характеристиками
удельной силы, быстродействия и точности работы. Компания имеет опыт
проектирования и создания силовых приводов в широком диапазоне
амплитуд и времени действия сил. Так, например, для привода дозирующего клапана топливной аппаратуры дизеля
достигнута амплитуда импульса механической силы 400 Н при длительности
действия этого импульса до 0,1 мс, а в приводе платформы стенда для ударных испытаний расчетная амплитуда импульса силы составила 6x106 Н при длительности действия до 1 мс.
Пьезоэлектрические силовые приводы.
Действие пьезоэлектрического привода основано на пьезоэлектрическом эффекте – взаимной, обратимой связи механических деформаций или напряжений и электрической поляризации в некоторых диэлектрических кристаллах.
Принципиальным недостатком пьезоэлектрического привода, ограничивающим его применение, является малое относительное изменение размеров даже при большой величине напряженности электрического поля. Вследствие этого, для перемещения привода, например на 50 мкм необходима суммарная высота кристаллов более 100 мм, что приводит к росту массы подвижной части привода и соответствующему увеличению требуемых сил. При этом механическая прочность пьезоэлектрических кристаллов при большом количестве циклов нагрузки и, особенно, при ударной нагрузке, возникающей при работе клапанов, значительно ниже прочности металлов, что приводит к невозможности получения большего быстродействия при достаточном ресурсе работы такого привода. Электромагнитные силовые приводы.
Принцип действия электромагнитного привода основан на стремлении магнитного поля, создаваемого протекающим через обмотку электромагнита током, к минимальному объему. Вследствие этого подвижный ферромагнитный якорь электромагнита стремится занять такое положение, когда средняя силовая линия магнитного поля в магнитопроводе электромагнита будет иметь минимально возможную для данной конструкции длину. Принципиальными недостатками электромагнитного привода, ограничивающими его быстродействие, являются: повышенная индуктивность вследствие свойств материала магнитопровода, большой начальный воздушный зазор снижающий величину начальной тяговой силы и эффект насыщения магнитопровода. Повышенная индуктивность препятствует быстрому увеличению тяговой силы после включения, большой начальный воздушный зазор снижает величину этой силы, а из-за эффекта насыщения магнитопровода, необходимо пропорционально увеличивать массу подвижной части магнитопровода, т.е. удельная (отнесенная к подвижной массе) величина силы тяги электромагнита ограничена. Электромагнит начинает работу при большой длине начального воздушного зазора. Следовательно, можно говорить о существовании предела быстродействия устройств с электромагнитным силовым приводом, что ограничивает область его применения.
Применив в одном устройстве физические эффекты, используемые в электромагнитных и электродинамических силовых приводах, нам удалось преодолеть их известные недостатки и получить привод с качественно новыми характеристиками удельной силы, быстродействия и точности работы. Электродинамические силовые приводы.
Принцип действия электродинамического привода основан на использовании эффекта силового взаимодействия электрического тока и магнитного поля.
Основными элементами конструкции существующих электродинамических приводов являются импульсный источник тока, включающий конденсатор, коммутатор и блок управления, а также толкатель привода, которым может являться электрическая катушка или электропроводящий якорь, который может быть выполнен в виде диска или цилиндра (гильзы). При пропускании через электрическую катушку импульса тока возникает магнитный поток, который взаимодействует с электропроводным материалом электропроводящего якоря и наводит в нем электродвижущую силу. Под действием электродвижущей силы в якоре возникает вихревой электрический ток. Ток якоря взаимодействует с магнитным полем катушки, создавая тем самым импульс механической силы отталкивания якоря от катушки. Обычно применяется способ регулирования привода изменением напряжения зарядки конденсатора и колебательный режим разряда конденсатора.
Основным преимуществом электродинамического силового привода, по сравнению с электромагнитным, является возможность получения очень короткого импульса механической силы значительной амплитуды. В отличие от электромагнитных приводов, в электродинамическом приводе отсутствует магнитопровод, что уменьшает индуктивность, снимает ограничения связанные с эффектом насыщения материала магнитопровода и существенно снижает массу якоря привода. Это позволяет заметно повысить удельную (отнесенную к массе якоря) силу развиваемую приводом. Такой привод менее чувствителен к длине воздушного зазора. Так, например, при увеличении длины воздушного зазора в приводе дискового типа от 0 мкм до 200 мкм амплитуда импульса механической силы электродинамического привода уменьшается примерно на 15 %, а в электромагнитном приводе сила тяги падает в 3-5 раз. Кроме того, электродинамический привод начинает свое движение при минимальной длине воздушного зазора и соответственно при максимальной эффективности. Таким образом, электродинамический привод позволяет получить последовательность рабочих ходов практически с нулевым интервалом. Кроме того, он менее чувствителен к отклонениям размеров привода, возникающим при производстве и эксплуатации, может работать при большом ходе якоря.
Однако известные электродинамические приводы обладают целым рядом существенных недостатков, к которым относится относительно низкий коэффициент полезного действия, невозможность длительной работы с высокой частотой срабатывания, сложность импульсного источника тока. Кроме того, известные силовые приводы функционируют близко к своим предельным возможностям по параметрам быстродействия и частоты срабатывания.
Электроуправляемый привод нового типа. Электродинамический привод (Патент Украины №UA16248 и Евразийский патент№011246). 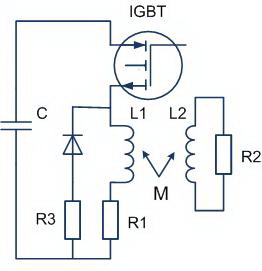
Рисунок 1.
Схема принципиальная электрическая электродинамического привода.
| В состав типичного электродинамического силового привода входят устройство формирования силового электрического импульса и сервопривод, преобразующий энергию электрического импульса в импульс механической силы.
В процессе разработки нового привода решалась задача повышения КПД и достижимого быстродействия. Решение было найдено в согласовании параметров источника электрической энергии с параметрами сервопривода. Это, в свою очередь, позволило снизить тепловыделение в устройстве и повысить допустимую частоту срабатывания сервопривода с заданным импульсом механической силы. В разработанном приводе применен импульсный источник электрической энергии на основе транзистора и электролитического конденсатора, который обеспечивает частичный разряд конденсатора в апериодическом режиме. Управление усилием, развиваемым сервоприводом, осуществляется в слаботочной цепи управления транзистором, что также обеспечивает повышение допустимой частоты срабатывания устройства.
Сервопривод (рисунок 2) состоит из электрической катушки 1,
толкателя 2 и расположенного между ними электрического изолятора 3,
предотвращающего замыкание витков электрической катушки
электропроводным толкателем.
|
Работа электродинамического привода осуществляется следующим образом.
Преобразование электрической энергии в линейное перемещение толкателя 2 сервопривода осуществляют путем подачи в неподвижную электрическую катушку 1 импульса тока от импульсного источника электрической энергии. Предварительно осуществляют накапливание энергии, преобразуемой в импульс механической силы, с помощью конденсатора. При включении коммутирующего транзистора, конденсатор частично разряжают на электрическую катушку 1. Таким образом, осуществляют переход части запасенной в конденсаторе электрической энергии в электромагнитную энергию обмотки электрической катушки 1.
| 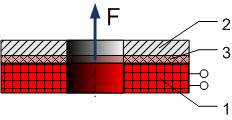
Рисунок 2.
Поперечный разрез сервопривода дискового типа.
|
Часть запасенной энергии тратится на нагрев проводников катушки 1, а
также теряется на тепловые потери от создаваемых вихревых токов в
корпусных деталях и т.п. Оставшаяся часть электромагнитной энергии создает электромагнитное поле
вокруг обмотки катушки 1 и тем самым осуществляют
частичную передачу индуктивным путем электромагнитной энергии в
толкатель 2 , который в данном варианте
выполнен в виде диска. Проникающий в электропроводящий диск переменный
электромагнитный поток наводит в диске вихревой ток, который,
взаимодействуя с магнитным потоком, проникшим в диск, создает импульс
механической силы. При этом выполняется отталкивание электропроводящего диска от катушки,
за счет чего осуществляют необходимое воздействие на перемещаемый
объект. Комбинированный электроуправляемый привод (патент Украины №UA27945).
При создании этого привода в одном устройстве были
применены физические эффекты, используемые в
электромагнитных и электродинамических силовых приводах. В процессе
разработки решалась задача обеспечения высокого КПД и быстродействия
при совместной работе электромагнитной и электродинамической частей на
всех участках движения толкателя привода.
Решение этой задачи позволило
повысить достижимую скорость перемещения толкателя и частоту
срабатывания привода при допустимом тепловыделении.
Так, например, для привода дозирующего клапана при рабочем перемещении
толкателя 0,1 мм достигнута амплитуда импульса механической силы 400 Н
при длительности действия этого импульса до 0,1 мс и допустимой частоте
срабатывания 1000_Гц, а в приводе платформы стенда для
ударных испытаний расчетная амплитуда импульса силы составила 60 000 кН
при длительности действия до 1 мс.
Эффективное
сочетание свойств электромагнитной и электродинамической частей
обеспечено за счет применения однотипных частей привода – дискового,
гильзового или конусного типа. При этом обеспечивается совместная
работа электромагнитной и электродинамической частей привода на всех
участках движения толкателя. Это в свою очередь позволяет перемещать
толкатель сервопривода в течение очень коротких и точно обозначенных
промежутков времени, обеспечивает требуемое быстродействие и требуемый
уровень КПД привода.
Использование раздельных катушек для электромагнитной и
электродинамической частей сервопривода позволило обеспечить
оптимальные электрические и магнитные характеристики каждой из частей,
а значит повысить мощность, достижимое быстродействие и частоту
срабатывания привода, которые ограничиваются свойствами общего
магнитопровода сервопривода в случае использования одной общей
электрической катушки.
При малых
рабочих перемещениях толкателя целесообразно дисковое исполнение
сервопривода. При этом наружные рабочие поверхности электромагнитной и
электродинамической частей сервопривода выполняются плоскими и
параллельными друг другу. Такой сервопривод обеспечивает наибольшую
механическую силу при минимальных размерах.
Для сравнительно больших
рабочих перемещений толкателя целесообразно применение сервопривода
гильзового типа. При этом рабочие поверхности электромагнитной и
электродинамической частей сервопривода выполняются цилиндрическими и
соосными друг другу. Такой сервопривод может обеспечить переменное
рабочее перемещение толкателя, отличается минимальным диаметром.
Для
малого и среднего диапазона рабочих перемещений толкателя
целесообразным является исполнение сервопривода конусного типа. При
этом наружные рабочие поверхности электромагнитной и
электродинамической частей сервопривода выполняются соосными друг другу
и конусными, оси вращения указанных поверхностей толкателя
ориентированы вдоль оси перемещения. Толкатель такого сервопривода
отличается наибольшей прочностью и жесткостью при минимальной массе,
меньшим гидравлическим сопротивлением по сравнению с толкателем
дискового типа, обладает выраженным эффектом автоматического
центрирования и обеспечивает максимальное быстродействие привода.
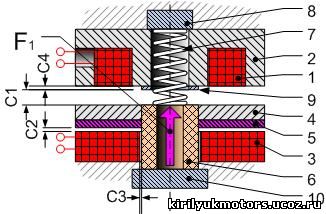 |  | Рисунок 3
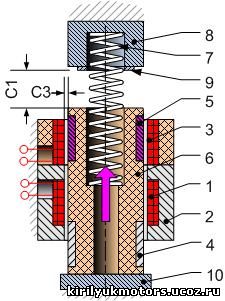
| Рисунок 4
|
Работа сервопривода в вариантах его исполнения показанных на рисунках 3 и 4 осуществляется следующим образом.
Импульсы
напряжений от внешних импульсных источников тока (на рисунках не
показаны) подают на обмотки катушек 1 и 3. Как правило, импульс
напряжения на обмотку катушки 1 подают несколько раньше, чем на обмотку
катушки 3 для компенсации сравнительно медленного нарастания силы в
электромагнитной части привода и достижения наибольшей суммарной силы
сервопривода. Под действием возникающих импульсов механической силы в
частях 4 и 5 толкатель сервопривода преодолевает силу сжатия пружины и
перемещается, при этом сокращается величина рабочего зазора C1. В конце
рабочего хода толкатель упирается в ограничитель хода 9, при этом между
поверхностью ферромагнитного диска 4 и ферромагнитного корпуса 2
остается воздушный зазор C4 для предотвращения эффекта «залипания».
После прекращения подачи напряжения на обмотку катушки 1 величина
механической силы, создаваемой электромагнитной частью сервопривода,
начинает уменьшаться и в момент, когда величина этой силы станет меньше
силы сжатия пружины 7, толкатель перемещается в исходное положение под
действием силы сжатия пружины 7. При достижении толкателем ограничителя
хода 10 цикл работы привода завершается.
| 
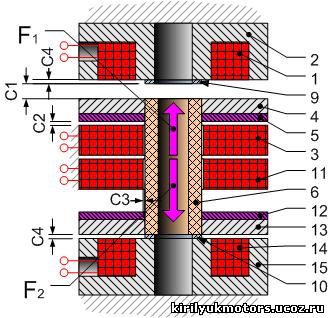
| Рисунок 5
| Рисунок 6
|
На
рисунке 5 представлен поперечный разрез реверсивного сервопривода
дискового типа. В дополнение к элементам привода, показанного на
рисунке 1, эта конструкция содержит вторую катушку 11
электродинамической части сервопривода, соответствующую ей
электропроводящую часть 12 толкателя, ферромагнитную часть 13
толкателя, электрическую катушку 14, размещенную в корпусе 15, второй
электромагнитной части сервопривода.
Работа реверсивного
комбинированного сервопривода в варианте его исполнения, показанном на
рисунке 5 осуществляется следующим образом.
Импульсы
напряжений от внешних импульсных источников тока (на рисунке не
показаны) подают на обмотки катушек 1 и 3. Под действием возникающих
импульсов механической силы в дисках 4 и 5 толкатель сервопривода
преодолевает силу инерции и перемещается, при этом сокращается величина
рабочего зазора C1. В конце прямого рабочего хода толкатель упирается в
ограничитель хода 9, при этом между поверхностью диска 4 и корпуса 2
остается воздушный зазор C4 для предотвращения эффекта «залипания»,
прямой рабочий ход завершается. Толкатель остается в этом положении
пока не будет прекращена подача напряжения на обмотку катушки 1. Затем
прекращают подачу напряжения на обмотку катушки 1, и подают импульсы
напряжений на обмотки катушек 11 и 14. Под действием возникающих
импульсов механической силы в дисках 12 и 13 толкатель преодолевает
силу инерции и перемещается в исходно положение. При достижении
толкателем ограничителя хода 10 цикл работы привода завершается.
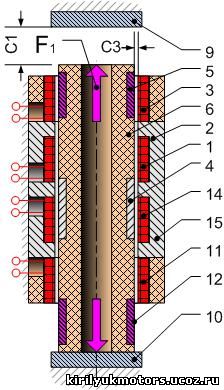
На
рисунке 6 представлен поперечный разрез одного из вариантов выполнения
реверсивного комбинированного электроуправляемого привода гильзового
типа. Позиции на рисунке соответствуют позициям рисунков 3 и 4.
| Рисунок 7
|
На рисунке 7 представлен поперечный разрез сервопривода, конусного типа.
Более подробно процессы, протекающие в ходе работы привода, описываются ниже.
В
комбинированном электроуправляемом приводе, при подаче импульса
напряжения на обмотку катушки 1, в этой обмотке возникает импульс тока,
который вызывает импульс магнитного потока, замыкающийся через корпус 2
и ферромагнитный диск 4, образующие магнитопровод электромагнитной
части сервопривода. При этом подвижная часть магнитопровода стремится
занять такое положение, когда длина средней магнитной линии
магнитопровода будет иметь минимальную величину. Таким образом, импульс
силы, создаваемый электромагнитной частью привода имеет направление,
показанное на фигуре 1 направлением вектора F1.
При
подаче импульса напряжения на обмотку катушки 3, в этой обмотке
возникает импульс тока, который создает импульс магнитного потока,
сцепленный с электропроводящей частью 5 толкателя, и имеющий ту же
длительность, что и импульс тока в обмотке катушки 3. Изменяющийся во
времени магнитный поток, вследствие эффекта электромагнитной индукции,
наводит в материале части 5 импульс электродвижущей силы той же
длительности, что и импульсы тока и магнитного потока. Закон
электромагнитной индукции описывается формулой:
Под
действием импульса электродвижущей силы в части 5 возникает импульс
круговых вихревых токов. Эти вихревые токи взаимодействуют с
проникающим в часть 5 магнитным потоком, созданным током в обмотке
электрической катушки 3 (закон Ампера), в результате чего возникает
импульс механической силы, имеющий ту же длительность, что и импульс
тока в обмотке катушки 3, импульс магнитного потока и импульс вихревых
токов в объеме материала части 3. Направление этого импульса силы
показано на фигуре 1 направлением вектора F1. Таким образом, при подаче
импульсов напряжения на обмотки электрических катушек 1 и 3, обе части
комбинированного привода создают механические силы, действующие в одном
направлении, хотя вклад этих сил в движение толкателя сервопривода на
различных фазах движения различен.
В
начальный момент времени движение толкателя происходит в основном под
действием импульса механической силы, создаваемого электродинамической
частью привода. Короткий и быстро нарастающий импульс механической силы
создает значительное ускорение толкателя сервопривода. В это же время в
электромагнитной части привода, вследствие высокой индуктивности
катушки 1 и большой величины воздушного зазора C1, механическая сила
незначительна и нарастает медленно.
По
мере прохождения части воздушного рабочего зазора сила, создаваемая
электродинамической частью привода, уменьшается и, после окончания
действия короткого импульса силы, прекращается. В это же время в
обмотке катушки 1 токи достигают своего максимального значения и по
мере сокращения рабочего зазора C1, импульс механической силы,
создаваемый электромагнитной частью привода, начинает играть основную
роль в движении толкателя. Кроме того, после прохождения толкателем
рабочего зазора C1, импульс механической силы, создаваемый
электромагнитной частью, используется для удержания толкателя в
поднятом положении. После прекращения подачи напряжения на обмотку
катушки 1, величина механической силы, создаваемой электромагнитной
частью привода, начинает уменьшаться и, в момент, когда величина этой
силы станет равной силе сжатия пружины 7, толкатель привода начинает
движение в исходное положение под действием силы сжатия пружины 7. При
этом время перехода толкателя в исходное положение определяется его
массой и величиной силы предварительного сжатия и жесткостью пружины 7.
Таким образом, преобразование
электрической энергии в линейное перемещение толкателя сервопривода
осуществляют путем подачи в неподвижные электрические катушки 1 и 3
импульсов тока от импульсных источников электрической энергии.
Предварительно осуществляют накапливание энергии, преобразуемой в
импульс механической силы, с помощью конденсаторов. При включении
коммутирующего устройства, в качестве которого использованы
транзисторы, конденсаторы разряжают на электрические катушки 1 и 3.
Таким образом, осуществляют переход части запасенной в конденсаторах
электрической энергии в электромагнитную энергию обмоток электрических
катушек 1 и 3. Часть запасенной энергии тратится на нагрев проводников
катушек 1 и 3, а также теряется на тепловые потери от создаваемых
вихревых токов в корпусных деталях и т.п. Оставшаяся часть
электромагнитной энергии создает импульс магнитного потока,
замыкающийся в магнитопроводе электромагнитной части сервопривода, при
этом выполняется притягивание ферромагнитной части толкателя к корпусу
катушки 1, за счет чего осуществляют необходимое воздействие на
перемещаемый объект. Другая часть электромагнитной энергии создает
электромагнитное поле вокруг обмотки электрической катушки 3, и тем
самым осуществляют частичную передачу индуктивным путем
электромагнитной энергии в электропроводящую часть 5 толкателя привода.
Проникающий в часть 5 толкателя переменный электромагнитный поток
наводит в ней вихревой ток, который, взаимодействуя с магнитным
потоком, проникшим в часть 5 якоря, создает импульс механической силы.
При этом выполняется отталкивание электропроводящей части 5 от катушки
3, за счет чего осуществляют необходимое воздействие на перемещаемый
объект. Части 4, 5 и стержень 6 соединены между собой, вследствие чего
создаваемые в них импульсы механической силы складываются.
Таким
образом, эффективно совместив в одном устройстве физические эффекты,
используемые в электромагнитных и электродинамических силовых приводах,
нам удалось создать силовой привод с уникальными характеристиками.
Например, для одного из вариантов привода были получены следующие
характеристики:
1. Перемещаемая масса (без учета подвижной массы самого привода) 16,5 г.
2. Усилие предварительной затяжки возвратной пружины – 48 Н.
3. Ход перемещения L - 0,28 мм.
4. Время прямого хода - 0,32 мс.
5. Время обратного хода - 0,56 мс.
6. Достигнутая частота перемещений - 500 Гц.
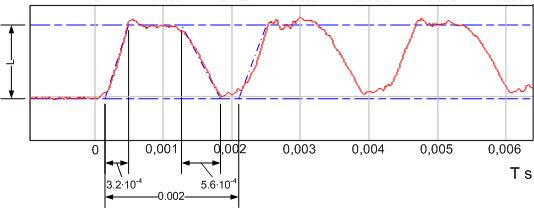
| Рисунок 8. Осциллограмма движения подвижной части привода.
|
|













